Teacher Version
Turning Ratio
Motor Speeds
The last two boxes of the lineTrackLeft and lineTrackRight commands are motor speeds. They affect how sharply the robot will turn toward and away from the black line.
To test out your robot in this activity, create a line tracking course that has a straight portion and a curved portion.
Below is an example of how the course could look:

Part 1: Modify your program so that the second box is set to 100 and the third box is set to 0. Download and run your program on a line tracking course that includes both straight and curved portions.
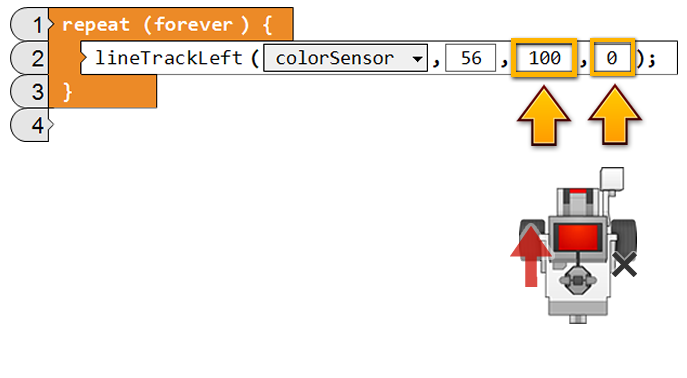
The robot turns very sharply, overshooting the line on the straight portions of the course.
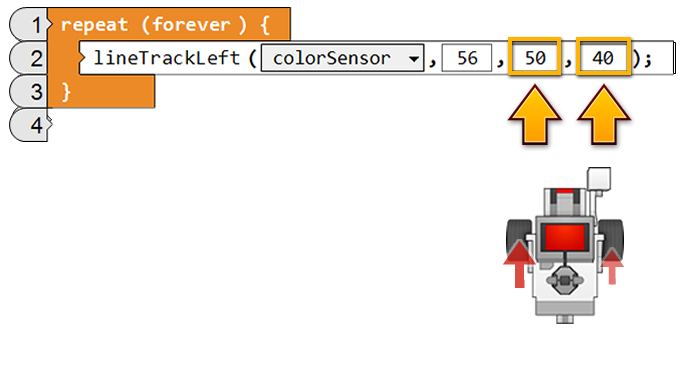
Part 2: Modify your program so that the second box is set to 50 and the third box is set to 40. Download and run your program on the same line tracking course.
Check Your Understanding
- Why is it important to control the speed at which the robot tracks a line?
- If the robot turns too fast and overshoots the line, it will not track the line correctly.
- If the robot turns too slowly, it will not track sharp turns in the line.
- Depending upon how straight or curved a line is, it may require the robot to turn at different speeds.
- All of the above